| Occupation | 1990 | 2010 |
|---|---|---|
| Secretary | ✓ | ✓ |
| Nurse | ✗ | ✓ |

Structurally Conditioned Diffusion Reproduces Skills-Based Stratification
How Skill Requirements Propagate — And Why They Preserve Hierarchies
Department of Sociology | Pontificia Universidad Católica de Chile
The Architecture We Build Upon
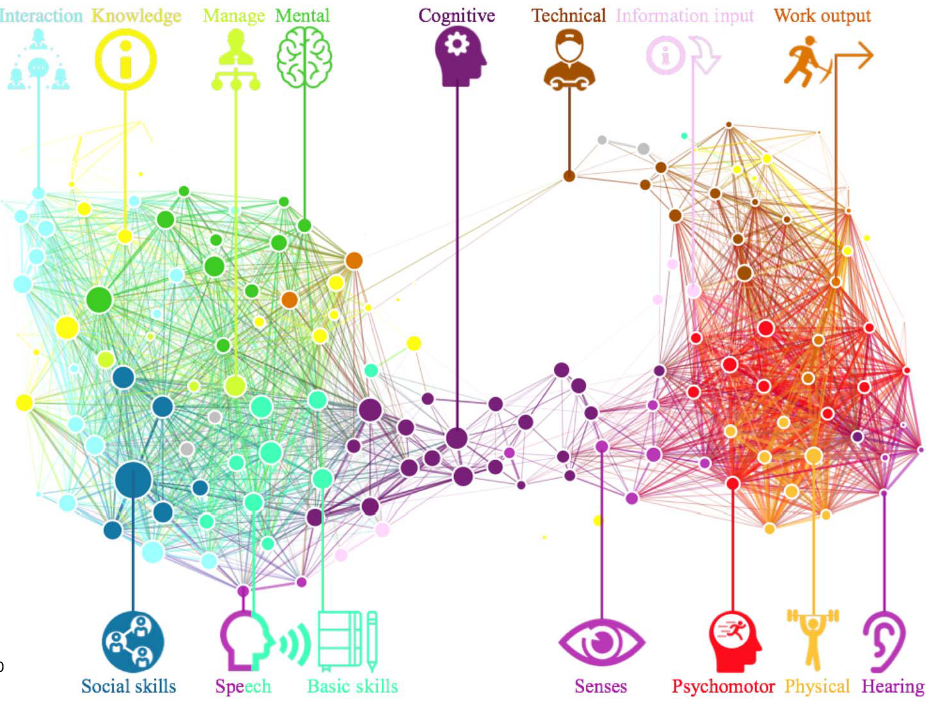
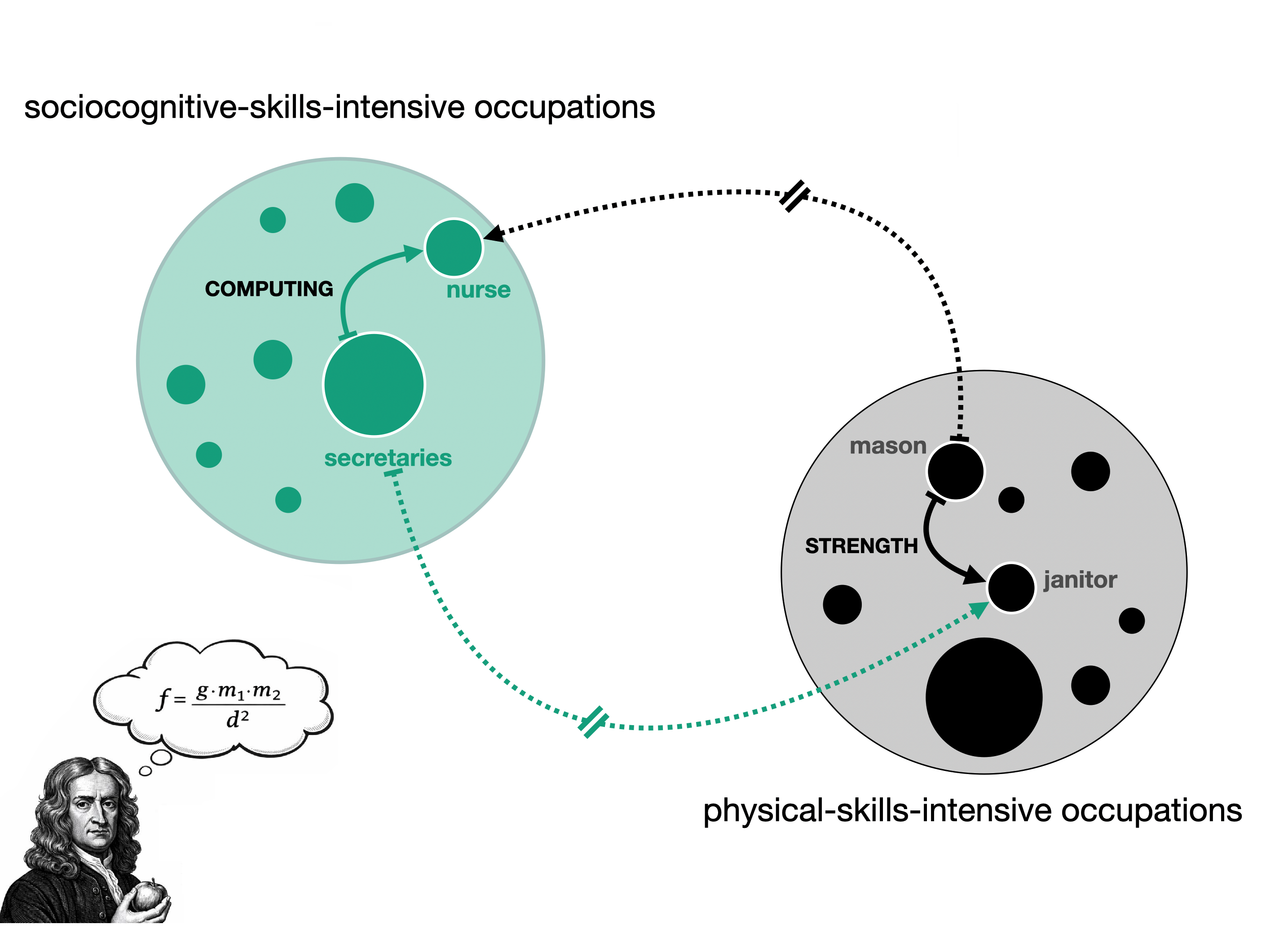
Polarization (Alabdulkareem et al. 2018)
- Skills cluster into two domains
- Socio-cognitive: high education, high wages
- Sensory/physical: lower education, lower wages
The Architecture We Build Upon
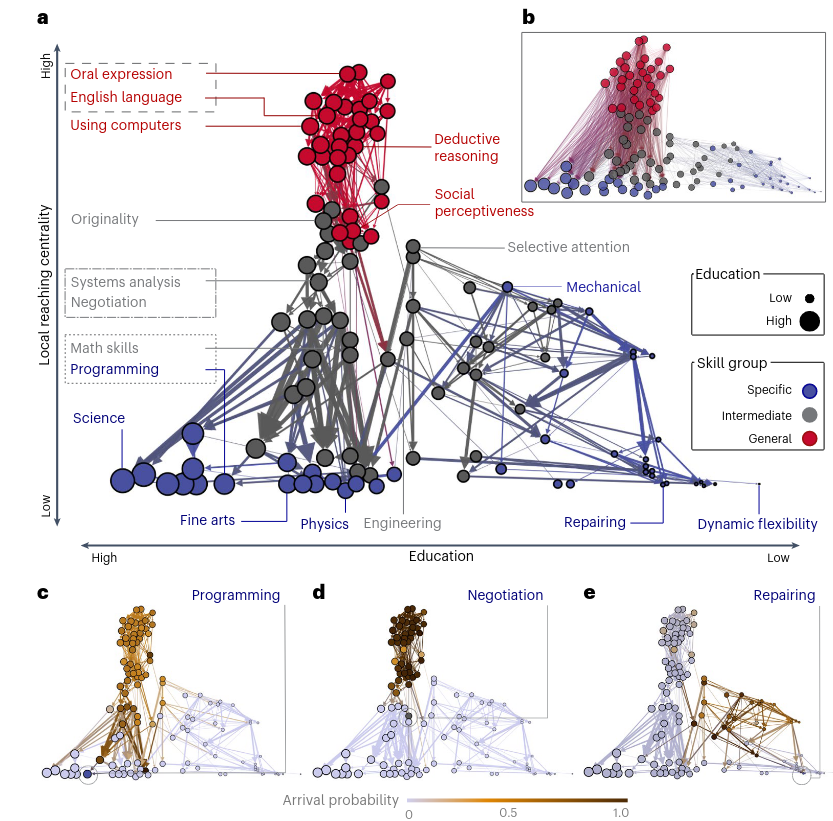
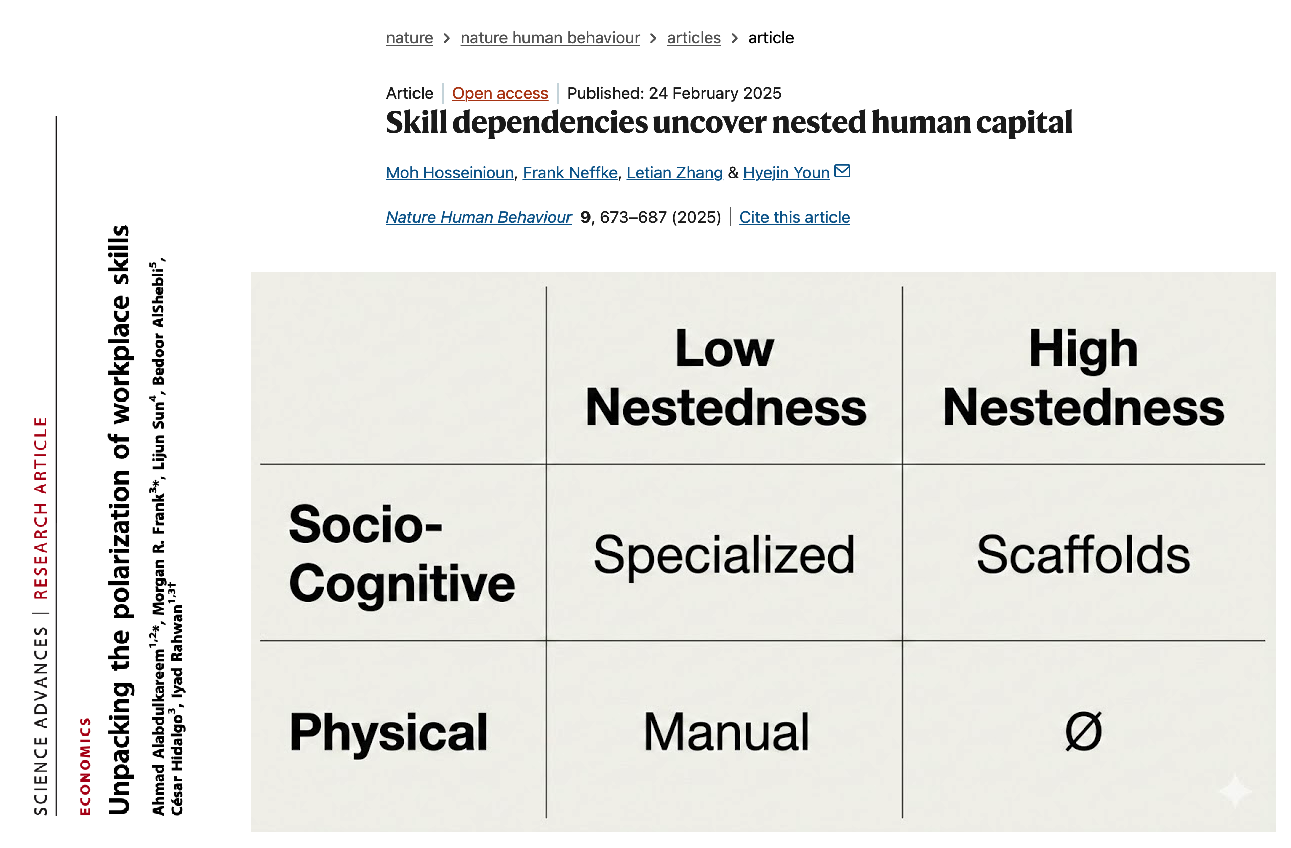
Nestedness (Hosseinioun et al. 2025)
- Asymmetric dependencies: some skills “enable” others
- Nested architecture has intensified over time
- Position in hierarchy predicts wages, automation risk
Skill diffusion as a gravity process
Skill specific diffusivity (g)
Masses (m)
Distance (d)
- Task similarity (symmetric)
- Status gap (asymmetric)
Measures II
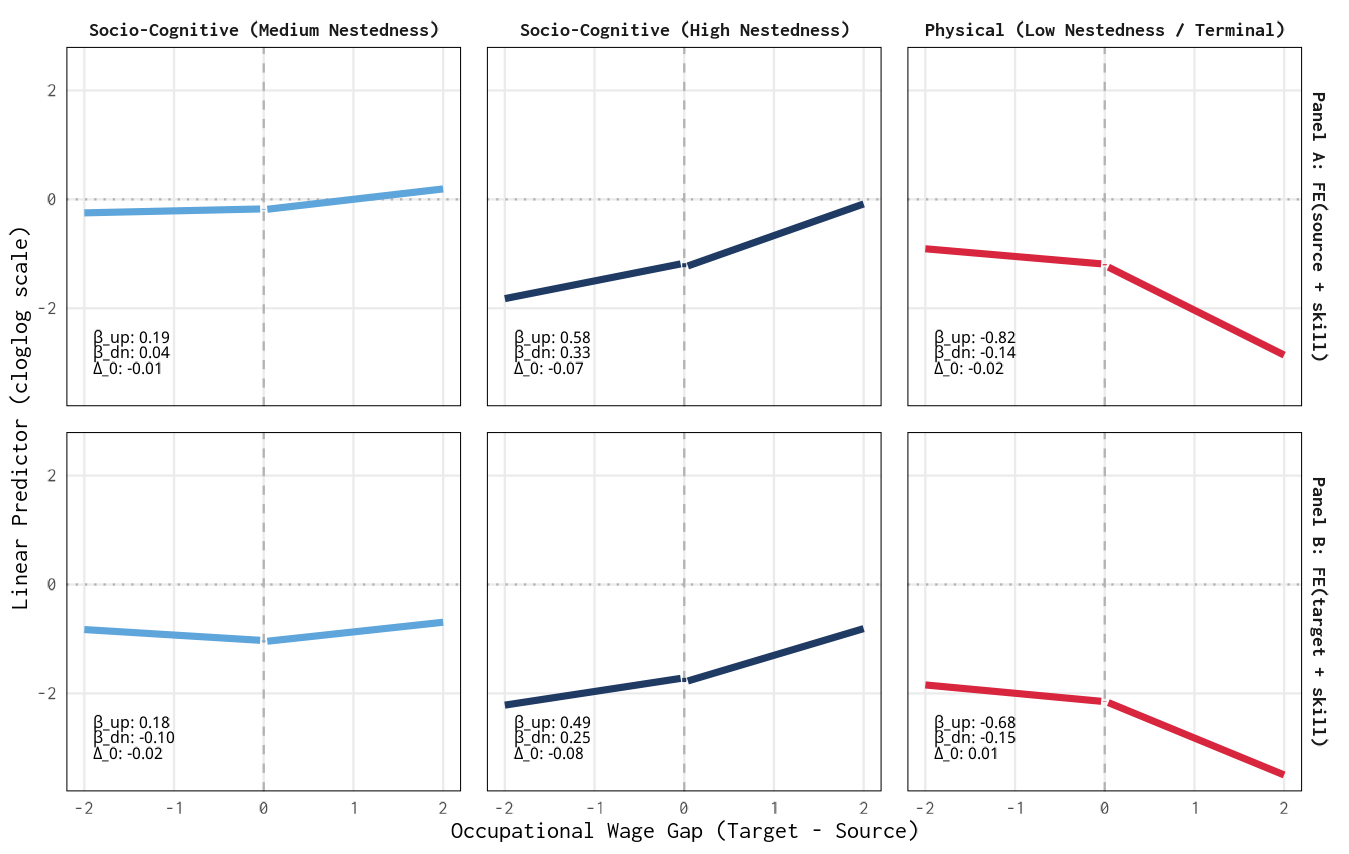
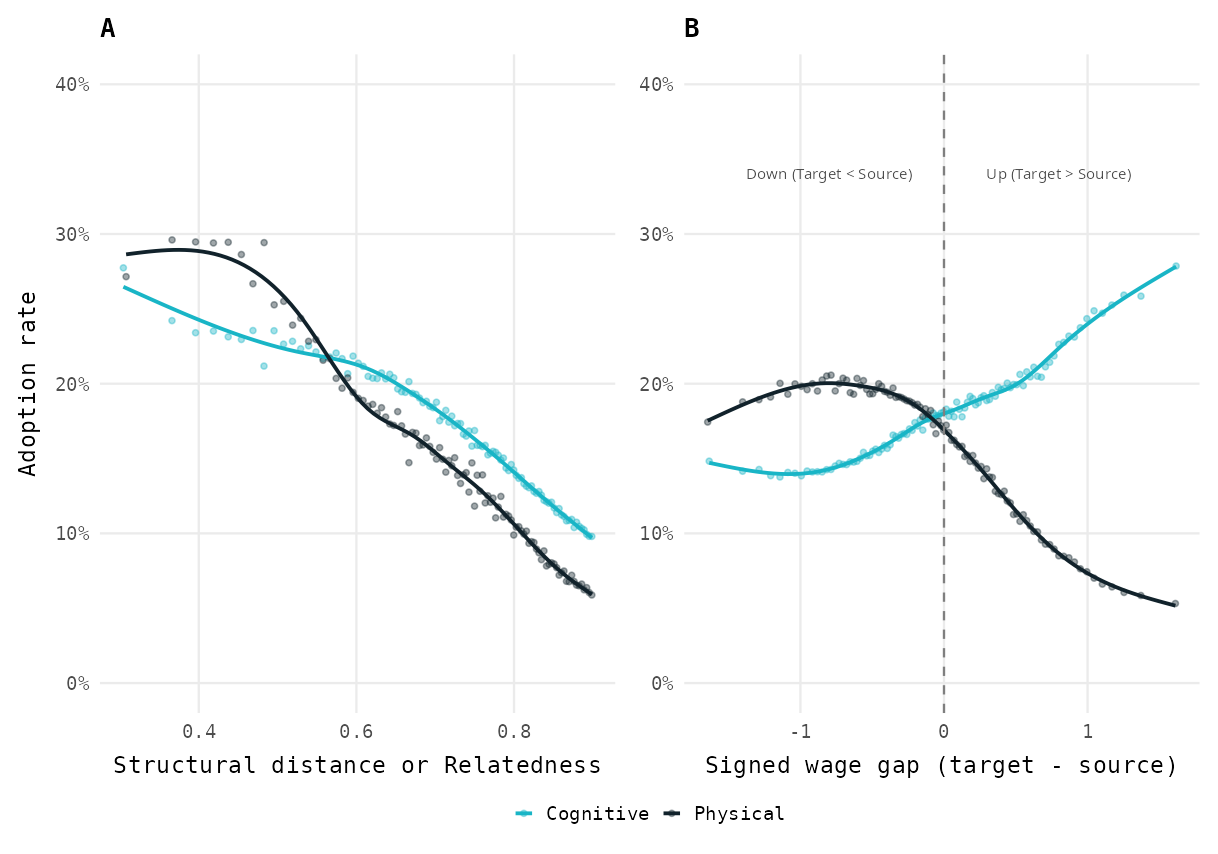
Skill type: Skill types might respond to wage gaps differently
Raw Patterns
Polarized Diffusion: Flow Networks
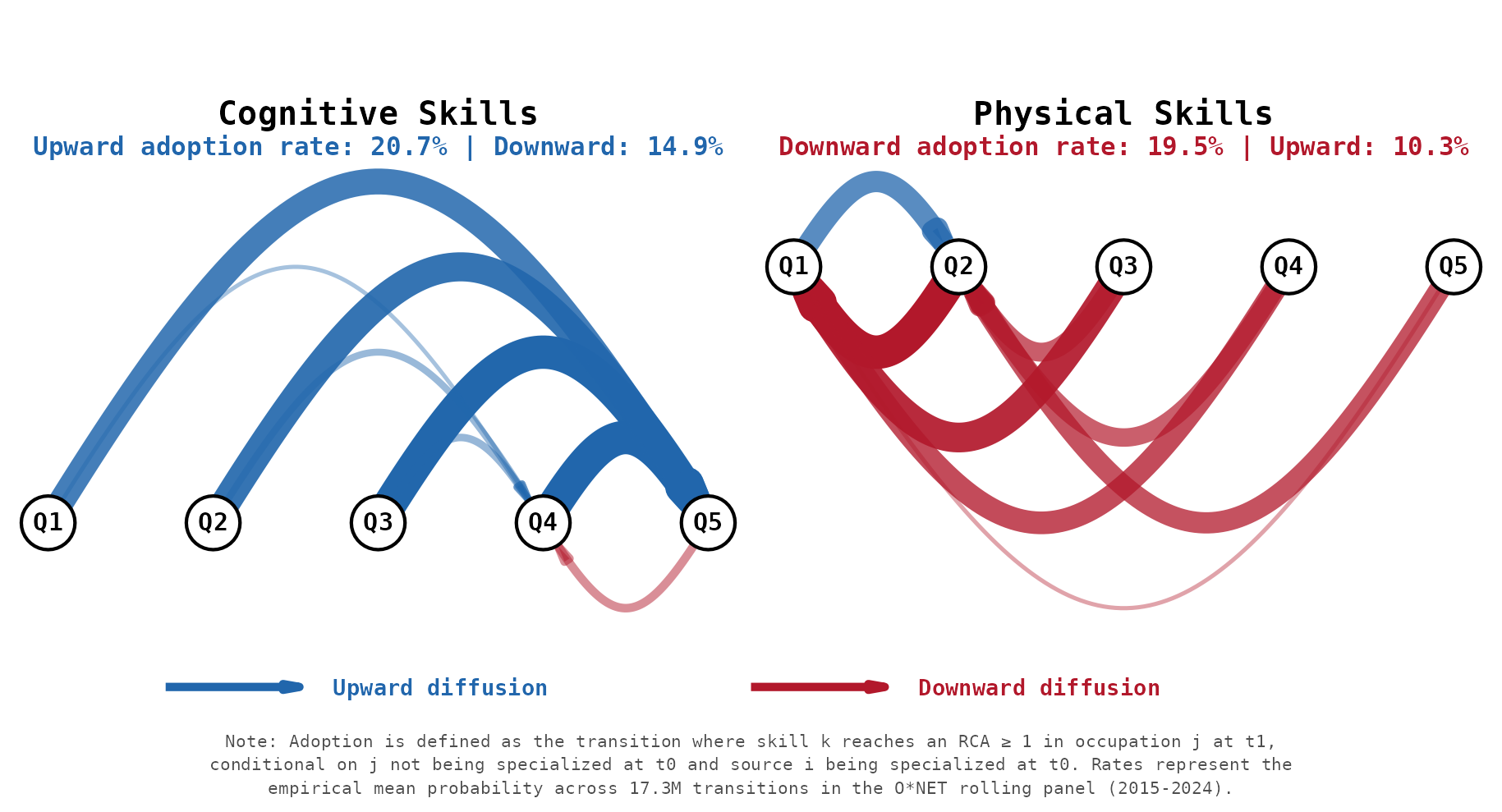
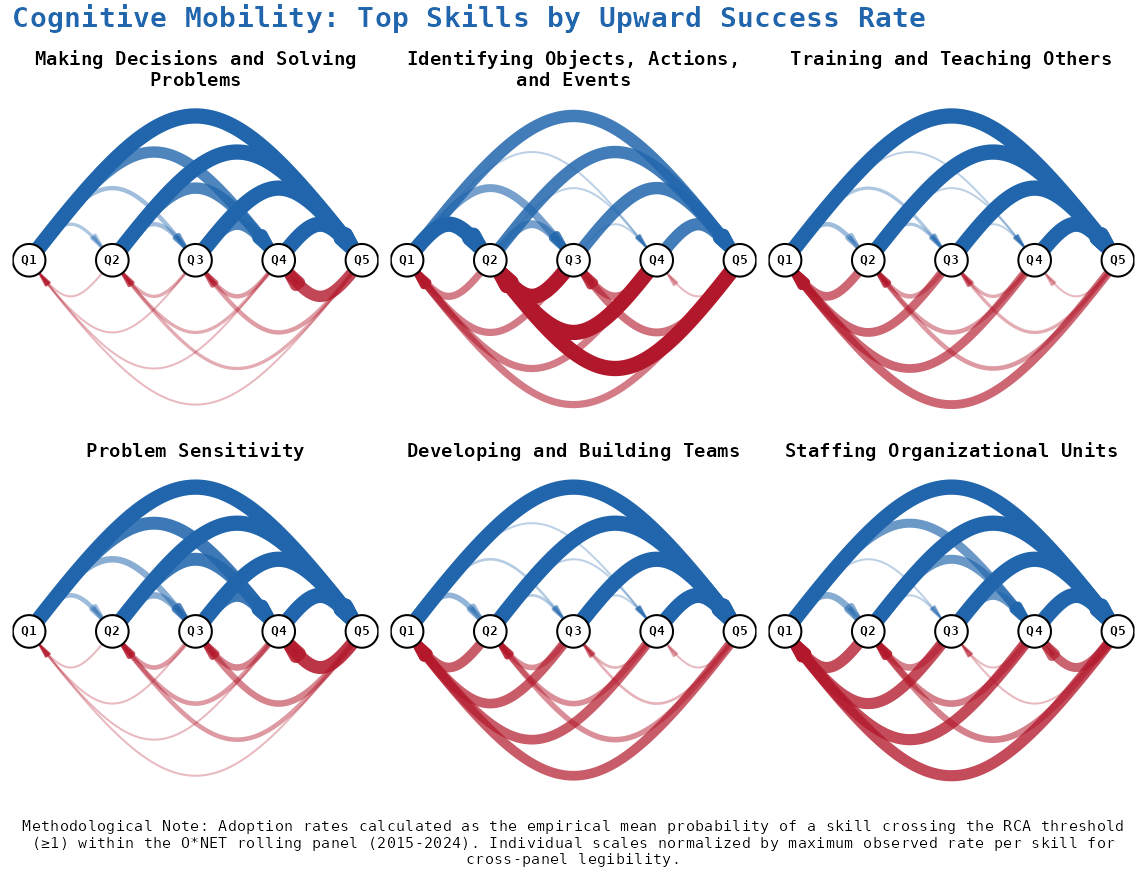
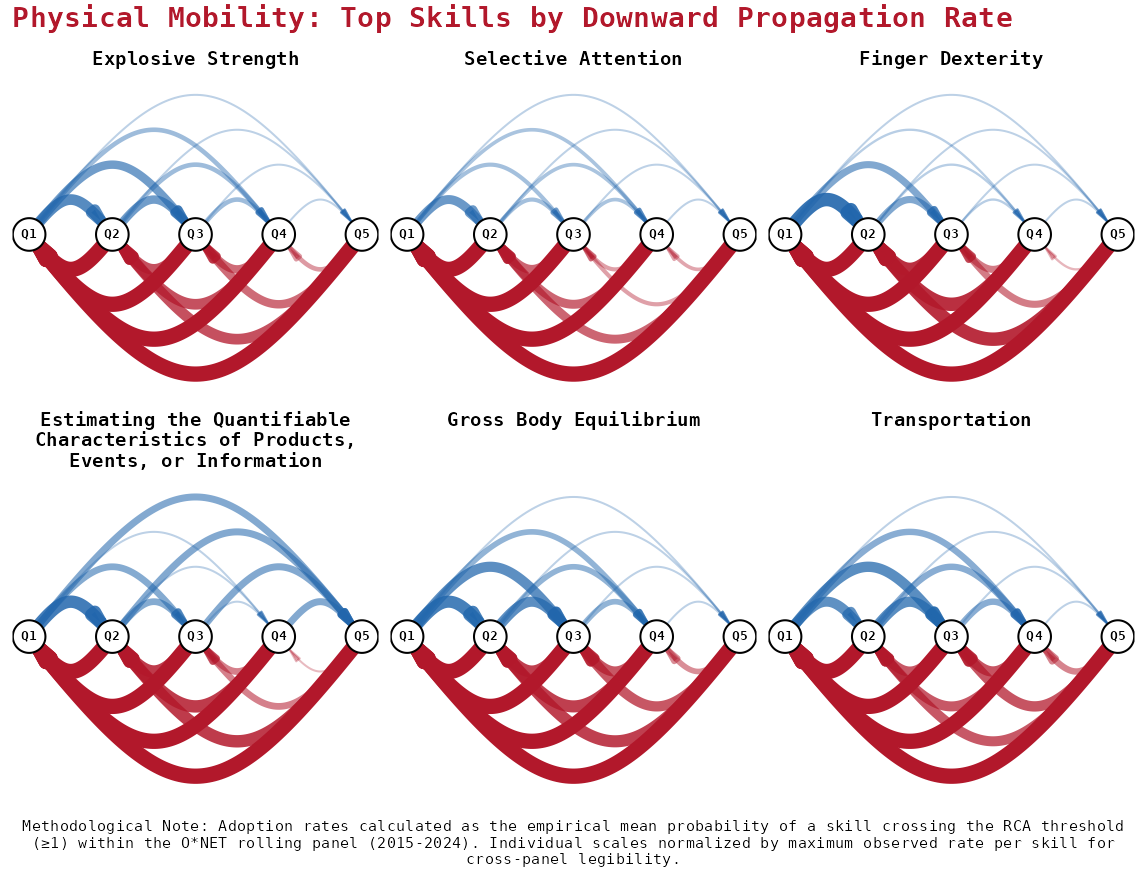
Asymmetric trajectory channeling by skill domain
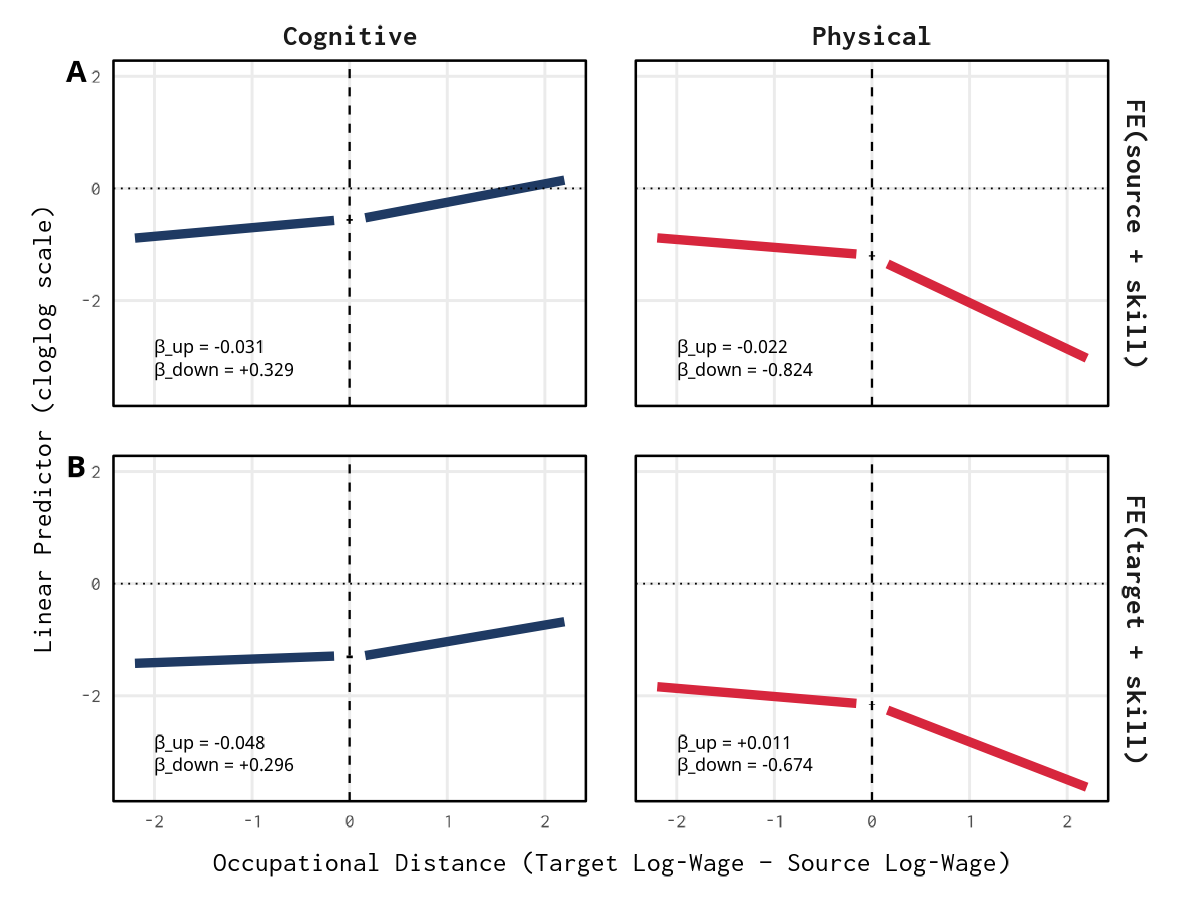
by domain & Nestedness